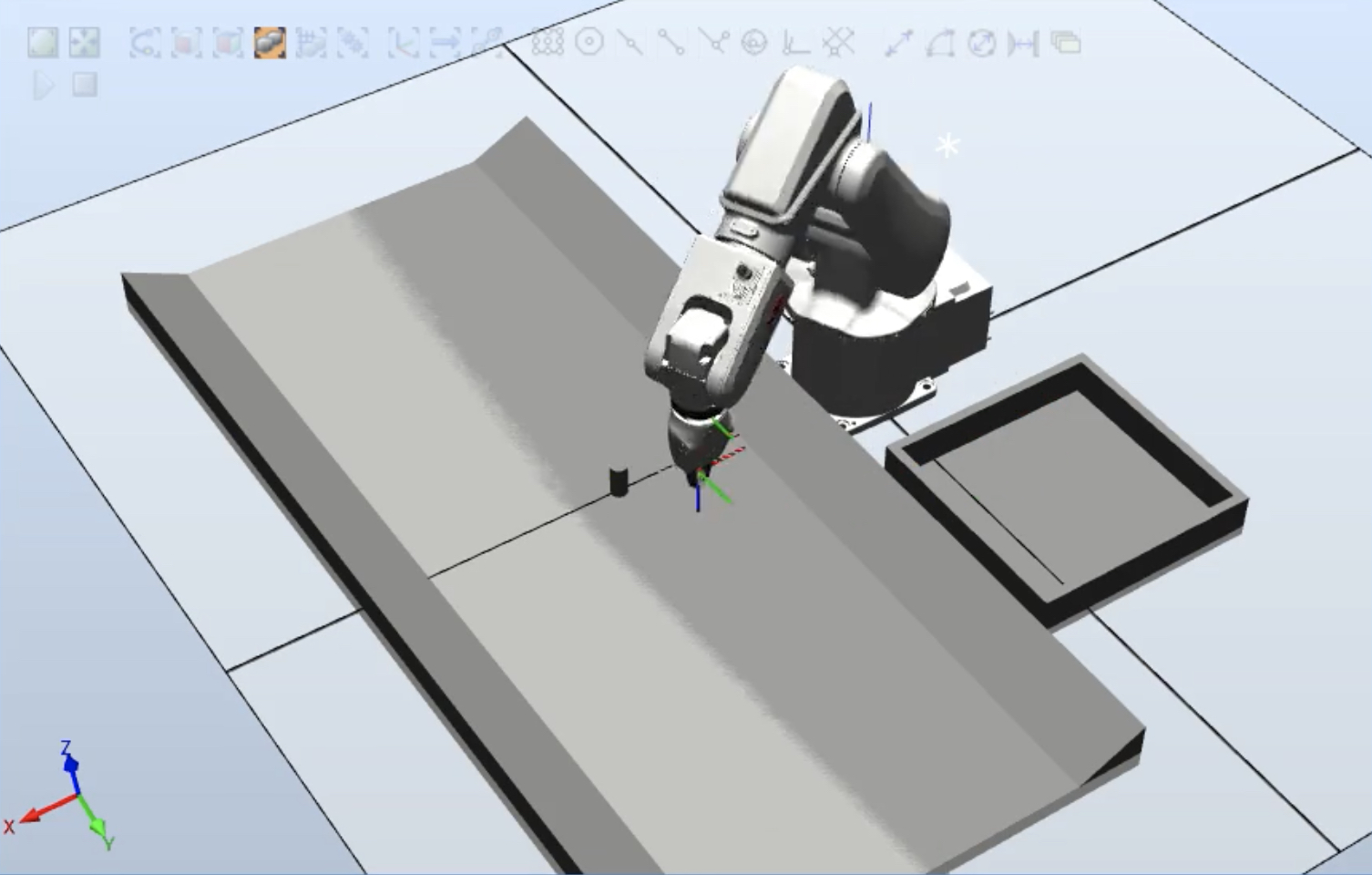
We developed an electromagnetic gripper to pick up metal scrap and programmed an ABB robot arm in simulation to move them from a conveyor belt into separate bins. The computer vision software locates the 'meatballs' (scrap metal parts) on the conveyor belt, and that information is sent to the ABB software which carries out the pick-and-place action.